A linear flight model of the flower-tracking hawkmoth
Advisor: Simon Sponberg
Advisor: Simon Sponberg
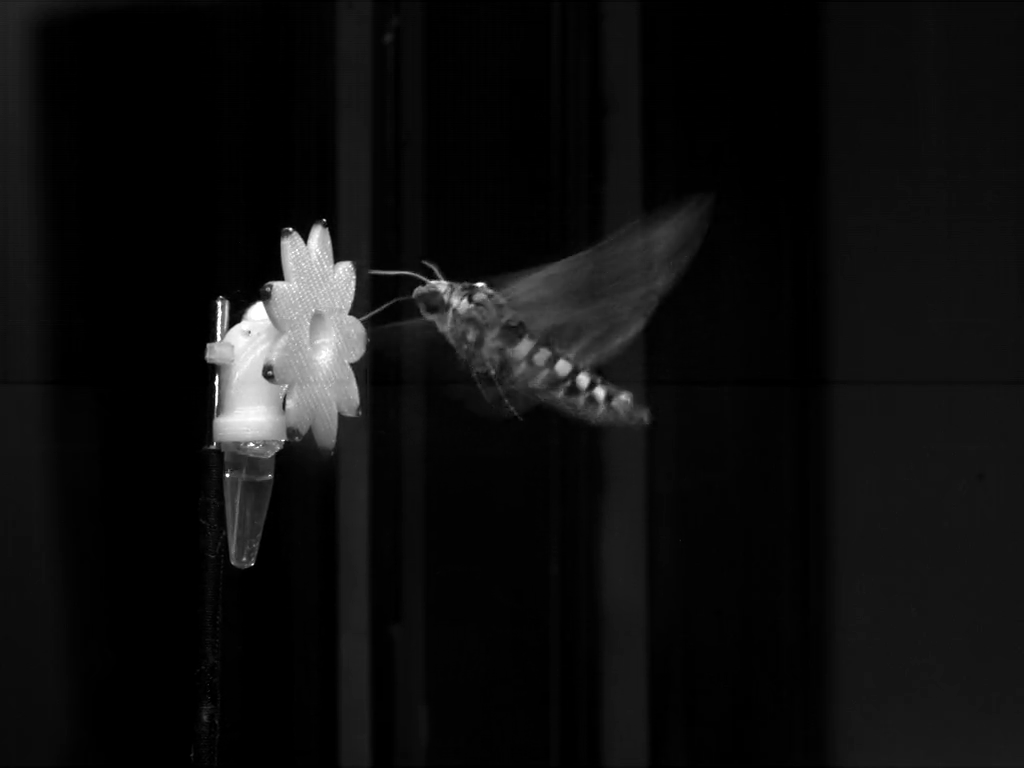
Comparative flight analysis of hawkmoths and silkmoths
Advisor: Simon Sponberg
Collaborator: Brett Aiello
Advisor: Simon Sponberg
Collaborator: Brett Aiello

|

Source: Pohjankonna Oy's channel on YouTube
|
Simulating surface-and-dive behavior of a bottlenose dolphin
Advisor: Abubakr Muhammad
We constructed a biomechanical model capable of generating six-DoF trajectories of a swimming dolphin. Our model attempts to closely emulate an actual surfacing and diving dolphin. The degree of biomechanical complexity of our model stands as a reasonable compromise between a complicated flexible multi-link body and an overly-simplified point-mass. We constructed our model through analyzing previously reported results and statistics on hydrodynamics, kinematics, maneuverability and propulsive efficiency of bottlenose dolphins observed during their surface-and-dive, porpoising and foraging behaviors. The results of our model's computer simulations match the previous reports on the dolphins' buoyancy, depth profiles, and speeds during ascent, descent, and porpoising activities.
A physical system for 24/7 observation of the Indus River dolphins through bio-acoustic tracking
(funded by WWF-Pakistan as part of IRDCP)
Group with: M.A. Rana, T. Ahmed, A. Zia. Advisors: A. Muhammad, S. Mazhar.
(funded by WWF-Pakistan as part of IRDCP)
Group with: M.A. Rana, T. Ahmed, A. Zia. Advisors: A. Muhammad, S. Mazhar.
Over the last few decades, a rapid decline in the population of the Indus River dolphins (Platanista gangetica minor) – one of the few river dolphins in the world – has brought them on the verge of extinction, most probably because dolphins wander into the irrigation canals during high flood season, but in winter, (when the canals are closed for cleanup) they get trapped in small desiccating pools and die because of inaccessibility to food.
For their conservation, we need to develop a robust and reliable system for tracking and analyzing the activities of these dolphins, so that the stranded dolphins can be timely rescued, and any other reasons for the decline in their population can be determined.
For their conservation, we need to develop a robust and reliable system for tracking and analyzing the activities of these dolphins, so that the stranded dolphins can be timely rescued, and any other reasons for the decline in their population can be determined.

Fig. 1) A dolphin found dead. (Photo Credits: Animal Planet, Discovery)
|

Fig. 2) A dolphin rescue operation by WWF-Pakistan. (AFP Photo: Shahid Ali. Source: http://www.rohri.net/indus-dolphin.htm)
|
Lacking a functional eyesight, the Indus River dolphins perceive their environment through echolocation (the use of sound waves to detect objects). To achieve this, they produce sound waves in the form of trains of pulses (clicks) – click trains (Fig 3) – ranging from 15 kHz to 250 kHz in frequency, and sense the reflections back. We sensed those clicks through underwater-sound-sensing devices, called hydrophones. These clicks were then extracted from the stream of incoming sensory data using a pulse-detection algorithm. We extracted the clicks through amplitude thresholding as well as through variance-based impulsive event-detection. To calculate the direction of arrival (DoA) of a dolphin's signal, we used two hydrophones. The time-delay of signal reception between the two hydrophones can be used to find the DoA, using the same technique as that used for multilateration.
Using the data we recorded from the two hydrophones, 1DoF DoAs of the dolphins detected in time spans of 3.6s were simulated, but with the ambiguity, as shown in Fig 5. To remove this ambiguity, another hydrophone should be placed ideally in a plane perpendicular to the plane of the previous two. This type of a hydrophone array allows the calculations of two angles, allowing the 1DoF DoA to be completely specified using triangulation.
Using the data we recorded from the two hydrophones, 1DoF DoAs of the dolphins detected in time spans of 3.6s were simulated, but with the ambiguity, as shown in Fig 5. To remove this ambiguity, another hydrophone should be placed ideally in a plane perpendicular to the plane of the previous two. This type of a hydrophone array allows the calculations of two angles, allowing the 1DoF DoA to be completely specified using triangulation.
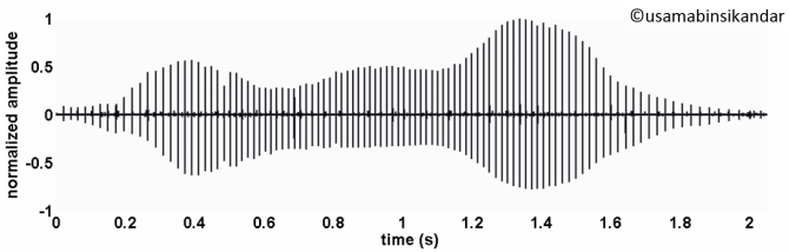
Fig. 3) A click train of the Indus River Dolphin.
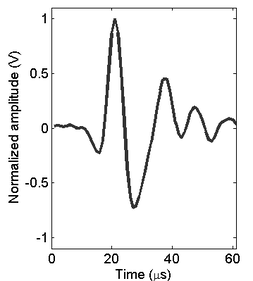
Fig. 4) A zoomed-in single click from the click train.
|
Fig. 5) Different colors represent different individual dolphin at their respective bearings from the hydrophone at the center, in a timespan of 3.6s.
|
