The motivation behind my research is the appreciation and use of Mathematics in understanding Life as a marvelously intricate phenomenon that has evolved to its present state over a very long period of time through Natural Selection. Though we are a part of it but since the ability to understand such a complex and efficiently executing phenomenon has evolved in us, we should definitely get inspiration from it for finding near-optimum solutions to our own problems.
Behaviorial and biomechanic modeling of bottlenose dolphin, and its simulation
Joint work with Dr Abubakr Muhammad
Summary
An extension to my senior-year project, directed towards more of a tracking problem, my current research is a joint work with Dr Abubakr Muhammad and Talha Manzoor at CYPHYNETS. We aim to achieve 6DoF tracking of a dolphin in a simulated environment, which means tracking not only the (x,y,z) position, but also tracking the orientation of the dolphin i.e. whether the dolphin is facing up, down, north, south, east, west, or somewhere in between. In the process of making such a bioacoustic dolphin tracking system, a major hurdle we face is visiting the dolphin sites at a distance of about 800 km from our lab and testing different sensor configurations and tracking algorithms at those sites. To avoid such frequent visits, we have attempted to design a simulated environment with an animated swimming and echolocating dolphin. There have been discrete attempts in the past to observe and present the statistics of the swimming behavior, hydrodynamics, or bioacoustics of bottlenose dolphins. But in our work, we have accumulated the results of some previous studies on these aspects and combined them to develop an overall mathematical model that can allow us to simulate a lively bottlenose dolphin and its bioacoustics, for testing the tracking algorithms. We have modeled the dolphin’s body as a rigid prolate spheroid. Sufficient for our purpose of bioacoustic tracking, we have assumed the body of our dolphin model as rigid and have not incorporated the stroking and undulating movement of the dolphin’s elastic body. The configuration of our dolphin model can be specified in two coordinate frames: the world frame (WOxyz) and a body-attached frame (BOxyz). The 3D translational motion is specified by the position X(x; y; z; t) of the center-of-mass of the spheroid with respect to the world frame; while the 3D orientation is specified as roll-pitch-yaw angles specified by (psi ; theta ; phi
) in the body frame. We have modeled the dynamics of the dolphin body by incorporating bouyancy, viscous drags, and inertial effects with both the translational and rotational perspectives, each in 3D; forming two separate differential equations for translational and rotational locomotion (maneuverability) of the dolphin. The differential equations are driven by: a 3D thrust force vector for translational motion, and a 3D torque vector for rotational motion. These driving forces are controlled through non-linear modified-PID controllers, driven by reference linear velocities and reference heading direction of the dolphin - which are governed by actions during different dolphin behaviors of migration, prey-search, foraging, porpoising, and surfacing. These behaviors are generated through probabilistic decision making, while generating random numbers from uniform, negative exponential and Erlang distributions - wherever appropriate. Finally, the differential equations are solved numerically through Euler's approximation and dolphin trajectory is generated and 3D-simulated in Matlab. For the acoustics part, I read some literature and selected an appropriate model for the dolphin’s sonar beam. Now I am trying to make its acoustic field dynamic, considering the reflections from the water-air boundary as well. We plan to achieve the research objectives within next few weeks, and then publish this research.
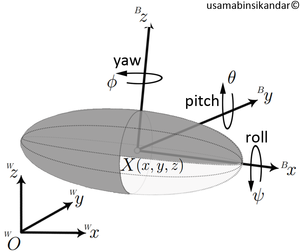
Fig. 1) Configuration space of the dolphin model: X(x,y,z) represents the position of the center of mass in the world frame WOWxWyWz. Rotations are defined as local roll-pitch-yaw angles in the body-attached frame BOBxByBz: ψ about x, θ about y, and φ about z axes of the body-attached frame.
Dolphin Trajectories
I have modeled the swimming behavior of dolphin using behavior-based goal-to-goal control, based on the bottlenose dolphin's diving physiology statistics reported by Skrovan et. al. [1].
Using this technique, I generated a 3D trajectory shown in Fig 3. Two portions of the trajectory around z = 0 represent the two instances of dolphin coming to surface for breathing (water surface is considered as z = 0). After the first surfacing instance, dolphin decided and executed a deep dive of roughly 80m, and after the second surfacing instance, it decided and executed a shallow dive of roughly 40m.
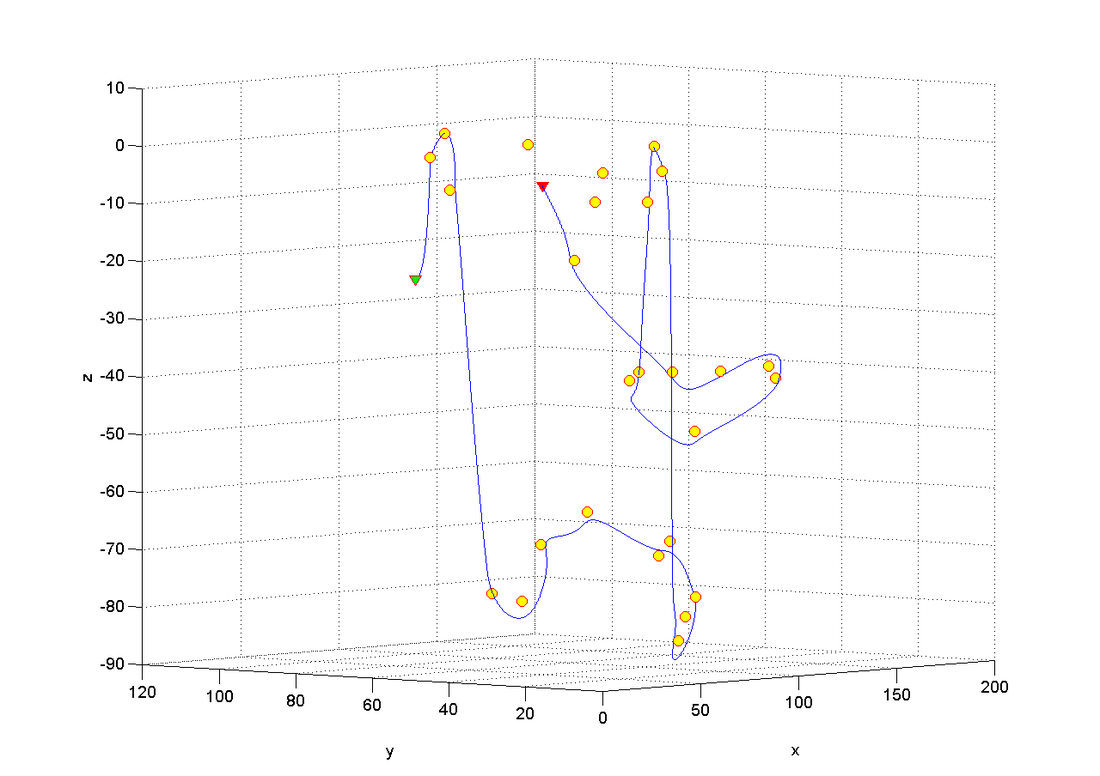
Fig. 3) Dolphin model's trajectory generated for a time-span of 200s, and the axis units are in meters. Green and red markers are starting and ending points respectively, while yellow markers represent goals or check-points in the path.
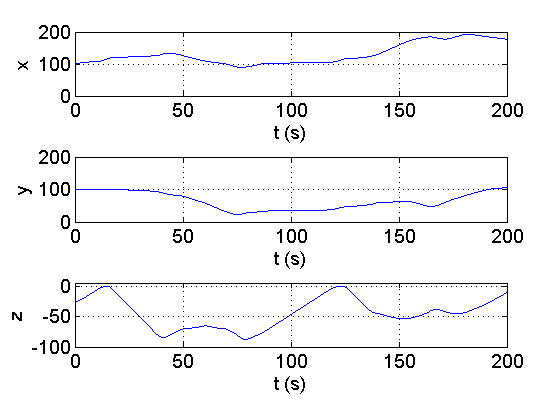
Fig. 4) Dolphin model's positions in x, y and z plotted against time.
|
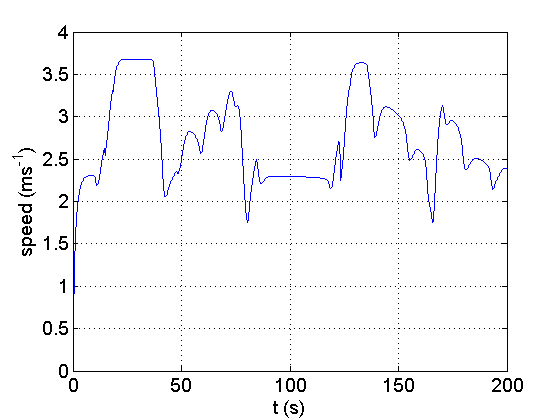
Fig. 5) Dolphin model's speed plotted against time.
|
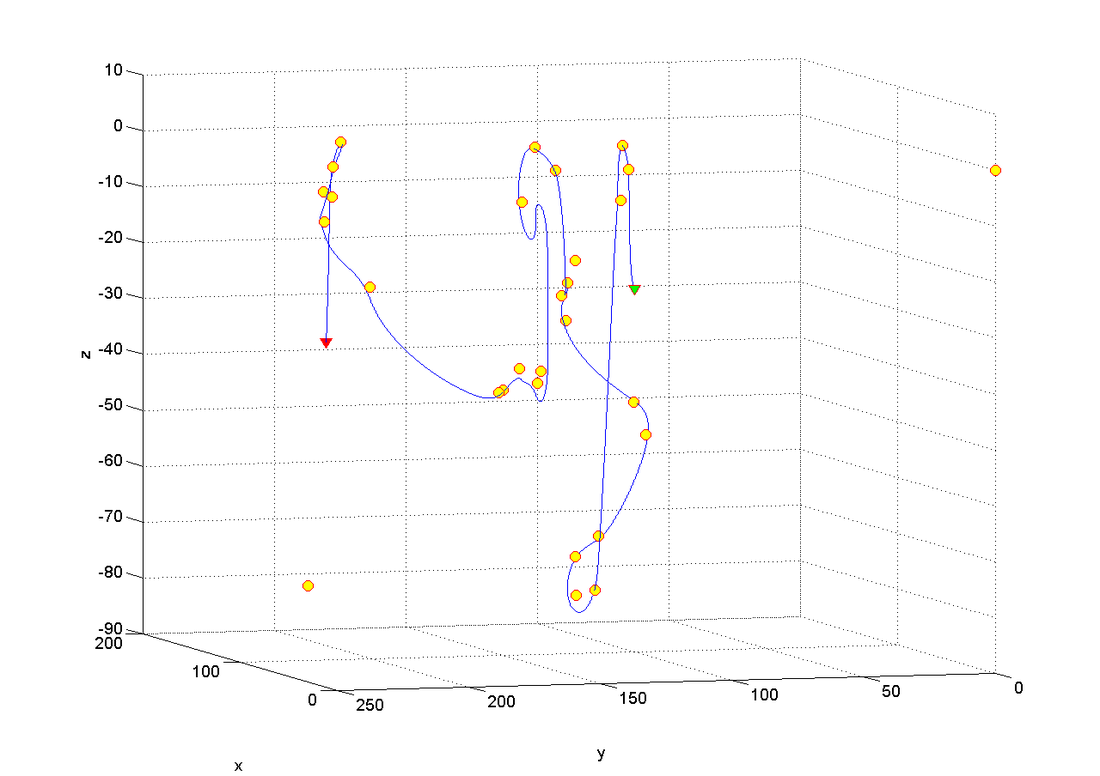
Fig. 6) Another trajectory generated, with same initial conditions as used for trajectory in Fig. 2. This trajectory is different from the previous one.
|
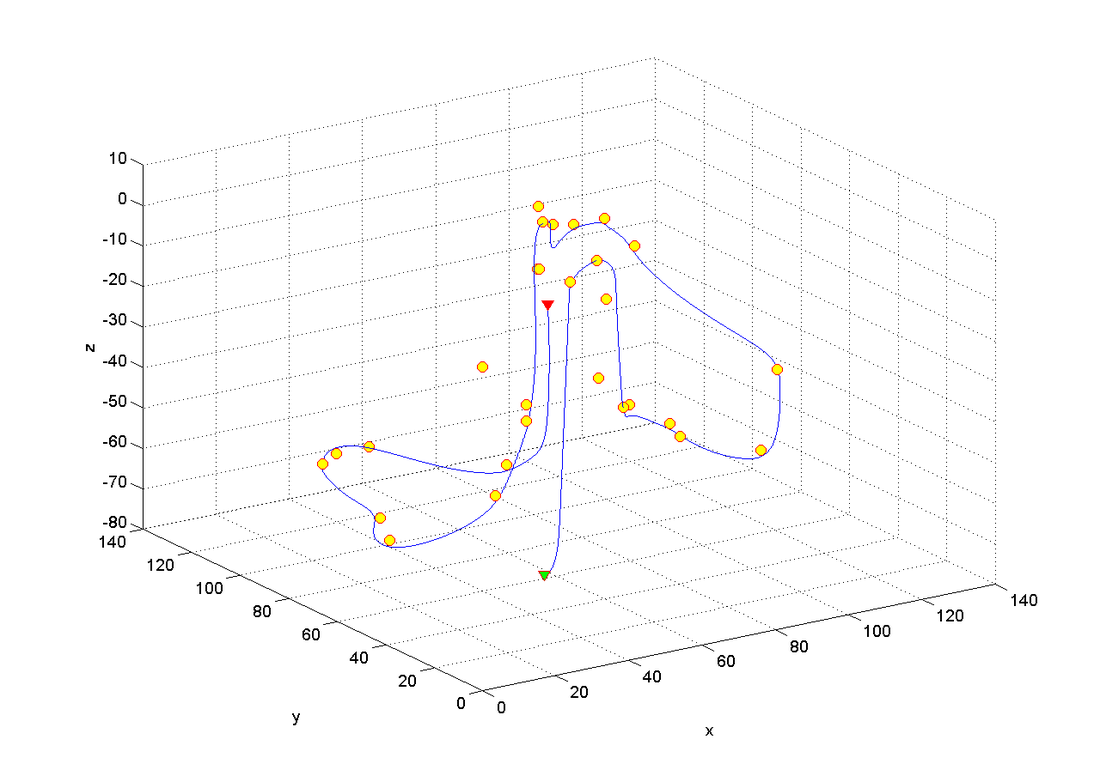
Fig. 7) Another trajectory generated with different initial conditions. This trajectory is different from the previous two.
|
Six-DoF Acoustic Tracking of a Simulated Dolphin
Joint work with Talha Manzoor and Dr Abubakr Muhammad.
After the modeling and simulation part as described above, for the tracking part, we first have to select an appropriate sensor configuration and then construct a sensor-network that can not only allow us to observe and sample the dolphin's trajectory, but also enable us to reconstruct/estimate the dolphin's actual trajectory in 6DoF up to an acceptable degree of error. Recently, we have employed extended-Kalman filter for the tracking and are trying to optimize it.
Three-DoF Position Localization
The position vector p of a dolphin in 3D space, relative to the position of a particular hydrophone H0 considered as origin, is shown in Fig 8.
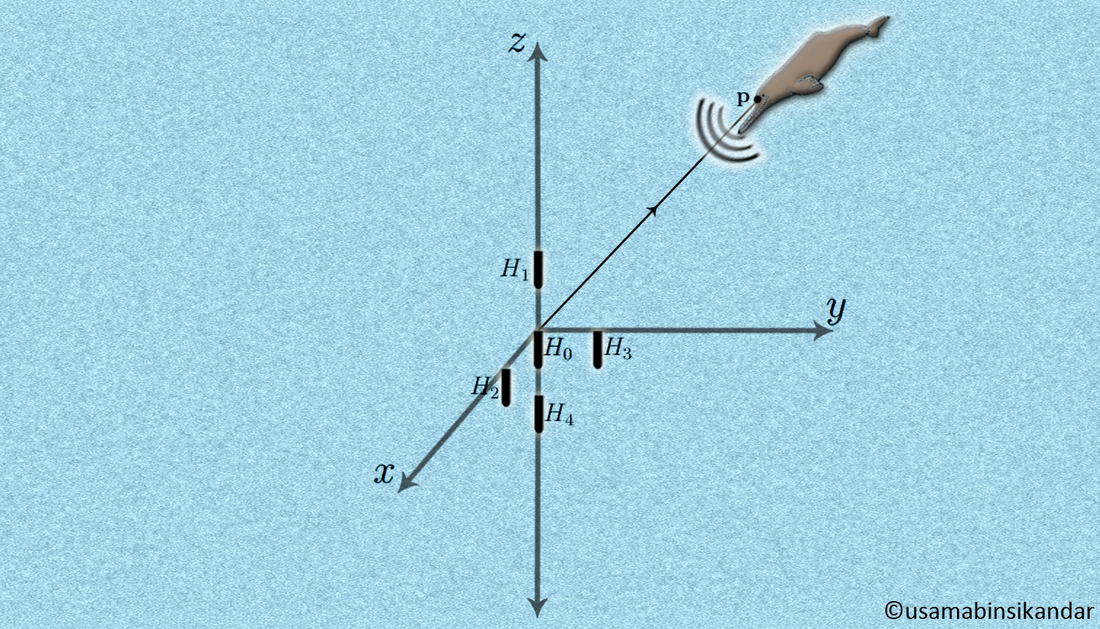
Fig. 8) Position vector p of the dolphin, relative to position of the hydrophone Ho. Five hydrophones Ho, H1, H2, H3 and H4 constitute one complete hydrophone array.
Five hydrophones are fixed on three lines perpendicular to each other, forming the hydrophone array, such that each line can be treated as an axis in the Cartesian plane. In our convention, H1 and H4 are on positive and negative parts of z-axis respectively, H2 is on x-axis, and H3 is on y-axis. The precise positions of the hydrophones are H0 (0, 0, 0), H1 (0, 0, d1), H2 (d2, 0, 0), H3 (0, d3, 0), and H4 (0, 0, -d4), with appropriate choices of di.
Hence, at least five hydrophones, placed as shown in Fig 8, can be used to calculate p as follows

We have chosen the geometry of the hydrophones' array and their ordered configuration, as shown in Fig 8, so as to make the matrix A full-rank and upper triangular which ensures its non-singularity and trivial invertibililty.
References
[1] R.C. Skrovan, T.M. Williams, P.S. Berry, P.W. Moore, R.W. Davis. The diving physiology of bottlenose dolphins (Tursiops truncatus). II. Biomechanics and changes in buoyancy at depth. J. Exp. Biol., 202 (1999), pp. 2749–2761.
